Dear all, I’ve modified my previous opengl program which use while loop to perform the animation, due to high cpu usage, I modify the program using empirical functions to animate the robot arm, but outcome the arm does not move, is there any suggestions to correct my program so as to make it move ?
Thanks for all your attentions
//Import library
#include <stdlib.h>
#include <string.h>
#include <stdio.h>
#include <time.h>
#include <math.h>
#include <GL/glut.h>
#include "gsrc.h"
const double PI = 3.14159265;
// angles to rotate the base, lower and upper arms of the robot arm
double theta, phi, psi,th;
//time interval for the animation
long deltaT;
static GLfloat t1 = 0;
GLint j = 0;
//initialize the window and everything to prepare for display
void init_gl() {
//set the initial value of the 3 angles
theta = phi = psi = 0.0;
//set the time interval
deltaT = 10;
//set display color to white
glClearColor(1,1,1,0);
//clear and enable z-buffer
glClear (GL_DEPTH_BUFFER_BIT);
glEnable (GL_DEPTH_TEST);
//clear display window
glClear(GL_COLOR_BUFFER_BIT);
}
//Draw the base of the robot arm
void draw_base(){
glPushMatrix();
//to create the quadric objects
GLUquadric *qobj,*qobjl,*qobju;
qobj = gluNewQuadric();
qobjl = gluNewQuadric();
qobju = gluNewQuadric();
//set the color of the cylinder
glColor3f(1.0,0.0,0.0);
//Re-position the cylinder (x-z plane is the base)
glRotatef(-90,1.0,0.0,0.0);
//Draw the cylinder
gluCylinder(qobj, 30.0, 30.0, 40.0, 40.0, 40.0);
//Draw the upper disk of the base
gluDisk(qobju,0,30,40,40);
glPushMatrix();
//Change the M(lowdisk<updisk)
glTranslatef(0,0,40);
glColor3f(0,0,0);
//Draw the lower disk of the base
gluDisk(qobjl,0,30,40,40);
glPopMatrix();
glPopMatrix();
}
/****************************Texture Work Starts***************************************/
//Load the raw file for texture
/* Global Declarations */
#define IW 256 // Image Width
#define IH 256 // Image Height
//3D array to store image data
unsigned char InputImage [IW][IH][4];
// Read an input image from a .raw file with double
void ReadRawImage ( unsigned char Image[][IH][4] )
{
FILE *fp;
int i, j, k;
char* filename;
unsigned char temp;
filename = "floor.raw";
if ((fp = fopen (filename, "rb")) == NULL)
{
printf("Error (ReadImage) : Cannot read the file!!
");
exit(1);
}
for ( i=0; i<IW; i++)
{
for ( j=0; j<IH; j++)
{
for (k = 0; k < 3; k++) // k = 0 is Red k = 1 is Green K = 2 is Blue
{
fscanf(fp, "%c", &temp);
Image[i][j][k] = (unsigned char) temp;
}
Image[i][j][3] = (unsigned char) 0; // alpha = 0.0
}
}
fclose(fp);
}
/****************************Texture Work Ends***************************************/
//Draw the 2x2x2 cube with center (0,1,0)
void cube(){
glPushMatrix();
glTranslatef(0,1,0);
glutSolidCube(2);
glPopMatrix();
}
//Draw the lower arm
void draw_lower_arm(){
glPushMatrix();
glScalef(15.0/2.0,70.0/2.0,15.0/2.0);//scale half is enough (some part is in the negative side)
cube();
glPopMatrix();
}
//Draw the upper arm
void draw_upper_arm(){
glPushMatrix();
glScalef(15.0/2.0,40.0/2.0,15.0/2.0);//scale half is enough (some part is in the negative side)
cube();
glPopMatrix();
}
void drawCoordinates(){
glBegin (GL_LINES);
glColor3f (1,0,0);
glVertex3f (0,0,0);
glVertex3f (300,0,0);
glColor3f (0,1,0);
glVertex3f (0,0,0);
glVertex3f (0,300,0);
glColor3f (0,0,1);
glVertex3f (0,0,0);
glVertex3f (0,0,300);
glEnd();
}
//Our drawing starts here
void showobj(void) {
//set the projection and perspective parameters/arguments
GLint viewport[4];
glGetIntegerv( GL_VIEWPORT, viewport );
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective( 45, double(viewport[2])/viewport[3], 0.1, 1000 );
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt( 0, 0, 400, 0, 0, 0, 0,1,0 );
// get the rotation matrix from the rotation user-interface
glMultMatrixf( gsrc_getmo() );
//Clear the display and ready to show the robot arm
init_gl();
//Draw coordinates
drawCoordinates();
//Robot Drawing Starts
//Rotate the base by theta degrees
glRotatef(theta,0.0,1.0,0.0);
//Draw the base
draw_base();
//M(B<La)
glTranslatef(0.0,40.0,0.0);
//Rotate the lower arm by phi degree
glRotatef(phi,0.0,0.0,1.0);
//change the color of the lower arm
glColor3f(0.0,0.0,1.0);
//Draw the lower arm
draw_lower_arm();
//M(La<Ua)
glTranslatef(0.0,70.0,0.0);
//Rotate the upper arm by psi degree
glRotatef(psi,0.0,0.0,1.0);
//change the color of the upper arm
glColor3f(0.0,1.0,0.0);
//Draw the upper arm
draw_upper_arm();
//Drawing Finish
glutSwapBuffers();
glFlush ();
}
//To animate the robot arm
void animate(void)
{
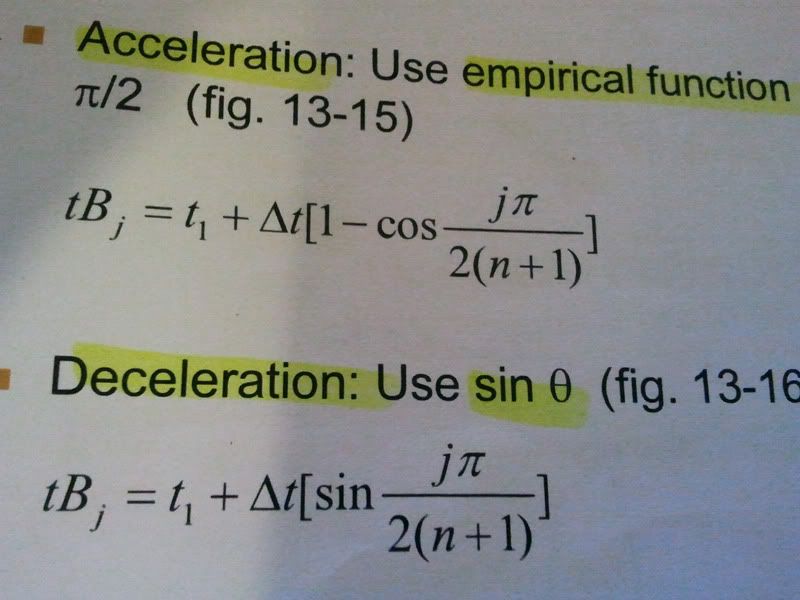
th = j * PI / (2 * (10+1));
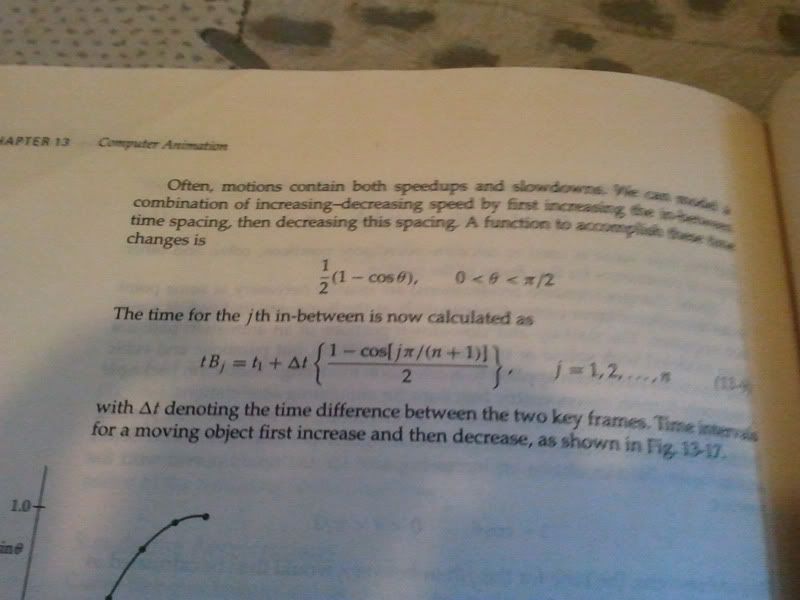
psi = t1 + deltaT * (1/2*(1-cos(th)));
j++;
if (j>10) j-=11;//reset j
glutPostRedisplay ();
}
//Deal with shadow matrix
void showshadow(){
}
void main (int argc, char** argv)
{
glutInit(&argc, argv);
//DOUBLE mode better for animation
// Set display mode.
glutInitDisplayMode( GLUT_DOUBLE | GLUT_RGB |GLUT_DEPTH);
glutInitWindowPosition( 50, 100 ); // Set top-left display-window position.
glutInitWindowSize( 400, 300 ); // Set display-window width and height.
glutCreateWindow( "My first OpenGL Game" ); // Create display window.
// Register mouse-click and mouse-move glut callback functions
// for the rotation user-interface.
//Allow user to drag the mouse and view the object
glutMouseFunc( gsrc_mousebutton );
glutMotionFunc( gsrc_mousemove );
// Display everything in showobj function
glutDisplayFunc(showobj);
//Perform background processing tasks or continuous animation
glutIdleFunc(animate);
glutMainLoop();
}