This is a try form a book:
void VolumetricFog::Load() {
pShaderProgram->CompileShader(VERTEX_SHADER, GLSLShader::VERTEX);
pShaderProgram->CompileShader(FRAGMENT_SHADER, GLSLShader::FRAGMENT);
pShaderProgram->Link();
// load noise 3D texture
int size = dim * dim * dim;
noise = new float[size];
std::random_device rd;
std::default_random_engine generator;
generator.seed(rd());
std::uniform_int_distribution<int> distribution(0, 255);
// Normalize
for (int i = 0; i < dim; i++)
for (int j = 0; j < dim; j++)
for (int k = 0; k < dim; k++)
noise[IX(i, j, k)] = distribution(generator) / 255.0f;
// Pass to OpenGL
glActiveTexture(GL_TEXTURE0);
glGenTextures(1, &textureID);
glBindTexture(GL_TEXTURE_3D, textureID);
// set the texture parameters
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_R, GL_CLAMP_TO_EDGE);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MIN_FILTER, GL_LINEAR_MIPMAP_LINEAR);
//set the mipmap levels (base and max)
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_BASE_LEVEL, 0);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MAX_LEVEL, 4);
glTexImage3D(GL_TEXTURE_3D, 0, GL_RED, dim, dim, dim, 0, GL_RED, GL_FLOAT, noise);
//generate mipmaps
glGenerateMipmap(GL_TEXTURE_3D);
//setup unit cube vertex array and vertex buffer objects
GLuint cubeVBOID, cubeIndicesID;
glGenVertexArrays(1, &cubeVAOID);
glGenBuffers(1, &cubeVBOID);
glGenBuffers(1, &cubeIndicesID);
//unit cube vertices
glm::vec3 vertices[8] = { glm::vec3(-0.5f,-0.5f,-0.5f),
glm::vec3(0.5f,-0.5f,-0.5f),
glm::vec3(0.5f, 0.5f,-0.5f),
glm::vec3(-0.5f, 0.5f,-0.5f),
glm::vec3(-0.5f,-0.5f, 0.5f),
glm::vec3(0.5f,-0.5f, 0.5f),
glm::vec3(0.5f, 0.5f, 0.5f),
glm::vec3(-0.5f, 0.5f, 0.5f) };
//unit cube indices
GLushort cubeIndices[36] = { 0,5,4,
5,0,1,
3,7,6,
3,6,2,
7,4,6,
6,4,5,
2,1,3,
3,1,0,
3,0,7,
7,0,4,
6,5,2,
2,5,1 };
glBindVertexArray(cubeVAOID);
glBindBuffer(GL_ARRAY_BUFFER, cubeVBOID);
//pass cube vertices to buffer object memory
glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), &(vertices[0].x), GL_STATIC_DRAW);
//enable vertex attributre array for position
glEnableVertexAttribArray(0);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 0, 0);
//pass indices to element array buffer
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, cubeIndicesID);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, sizeof(cubeIndices), &cubeIndices[0], GL_STATIC_DRAW);
glBindVertexArray(0);
}
void VolumetricFog::Draw()
{
Camera* pCamera = Camera::GetInstance();
projection = pCamera->GetProjection();
view = pCamera->GetViewMatrix();
model = glm::mat4(1.f);
model = glm::translate(model, mPos);
glm::mat4 MVP = projection * view * model;
glEnable(GL_BLEND);
glBindVertexArray(cubeVAOID);
//bind the raycasting shader
pShaderProgram->Use();
//pass shader uniforms
pShaderProgram->SetUniform("volume", 0);
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_3D, textureID);
pShaderProgram->SetUniform("MVP", MVP);
pShaderProgram->SetUniform("camPos", pCamera->Position);
pShaderProgram->SetUniform("step_size", 1.f / dim, 1.f / dim, 1.f / dim);
//render the cube
glDrawElements(GL_TRIANGLES, 36, GL_UNSIGNED_SHORT, 0);
//unbind the raycasting shader
//disable blending
glDisable(GL_BLEND);
}
int VolumetricFog::IX(int i, int j, int k)
{
return i + dim * j + dim * dim * k;
}
The code is pretty straight forward. First it creates noise 3D data stored in noise array and adds this data in a 3D texture. Then it generates a VAO of a cube. and then in the draw method it draws this cube.
vertex shader :
#version 330 core
layout(location = 0) in vec3 vVertex; //object space vertex position
//uniform
uniform mat4 MVP; //combined modelview projection matrix
smooth out vec3 vUV; //3D texture coordinates for texture lookup in the fragment shader
void main()
{
//get the clipspace position
gl_Position = MVP*vec4(vVertex.xyz, 1.f);
//get the 3D texture coordinates by adding (0.5,0.5,0.5) to the object space
//vertex position. Since the unit cube is at origin (min: (-0.5,-0.5,-0.5) and max: (0.5,0.5,0.5))
//adding (0.5,0.5,0.5) to the unit cube object space position gives us values from (0,0,0) to
//(1,1,1)
vUV = vVertex + vec3(0.5);
}
fragment shader:
#version 330 core
layout(location = 0) out vec4 vFragColor; //fragment shader output
smooth in vec3 vUV; //3D texture coordinates form vertex shader
//interpolated by rasterizer
//uniforms
uniform sampler3D volume; //volume dataset
uniform vec3 camPos; //camera position
uniform vec3 step_size; //ray step size
//constants
const int MAX_SAMPLES = 300; //total samples for each ray march step
const vec3 texMin = vec3(0); //minimum texture access coordinate
const vec3 texMax = vec3(1); //maximum texture access coordinate
void main()
{
//get the 3D texture coordinates for lookup into the volume dataset
vec3 dataPos = vUV;
//Getting the ray marching direction:
//get the object space position by subracting 0.5 from the
//3D texture coordinates. Then subtraact it from camera position
//and normalize to get the ray marching direction
vec3 geomDir = normalize((vUV-vec3(0.5)) - camPos);
//multiply the raymarching direction with the step size to get the
//sub-step size we need to take at each raymarching step
vec3 dirStep = geomDir * step_size;
//flag to indicate if the raymarch loop should terminate
bool stop = false;
//for all samples along the ray
for (int i = 0; i < MAX_SAMPLES; i++) {
// advance ray by dirstep
dataPos = dataPos + dirStep;
//The two constants texMin and texMax have a value of vec3(-1,-1,-1)
//and vec3(1,1,1) respectively. To determine if the data value is
//outside the volume data, we use the sign function. The sign function
//return -1 if the value is less than 0, 0 if the value is equal to 0
//and 1 if value is greater than 0. Hence, the sign function for the
//calculation (sign(dataPos-texMin) and sign (texMax-dataPos)) will
//give us vec3(1,1,1) at the possible minimum and maximum position.
//When we do a dot product between two vec3(1,1,1) we get the answer 3.
//So to be within the dataset limits, the dot product will return a
//value less than 3. If it is greater than 3, we are already out of
//the volume dataset
stop = dot(sign(dataPos-texMin),sign(texMax-dataPos)) < 3.0;
//if the stopping condition is true we brek out of the ray marching loop
if (stop)
break;
// data fetching from the red channel of volume texture
float sample = texture(volume, dataPos).r;
//Opacity calculation using compositing:
//here we use front to back compositing scheme whereby the current sample
//value is multiplied to the currently accumulated alpha and then this product
//is subtracted from the sample value to get the alpha from the previous steps.
//Next, this alpha is multiplied with the current sample colour and accumulated
//to the composited colour. The alpha value from the previous steps is then
//accumulated to the composited colour alpha.
float prev_alpha = sample - (sample * vFragColor.a);
vFragColor.rgb = prev_alpha * vec3(sample) + vFragColor.rgb;
vFragColor.a += prev_alpha;
//early ray termination
//if the currently composited colour alpha is already fully saturated
//we terminated the loop
if( vFragColor.a>0.99)
break;
}
}
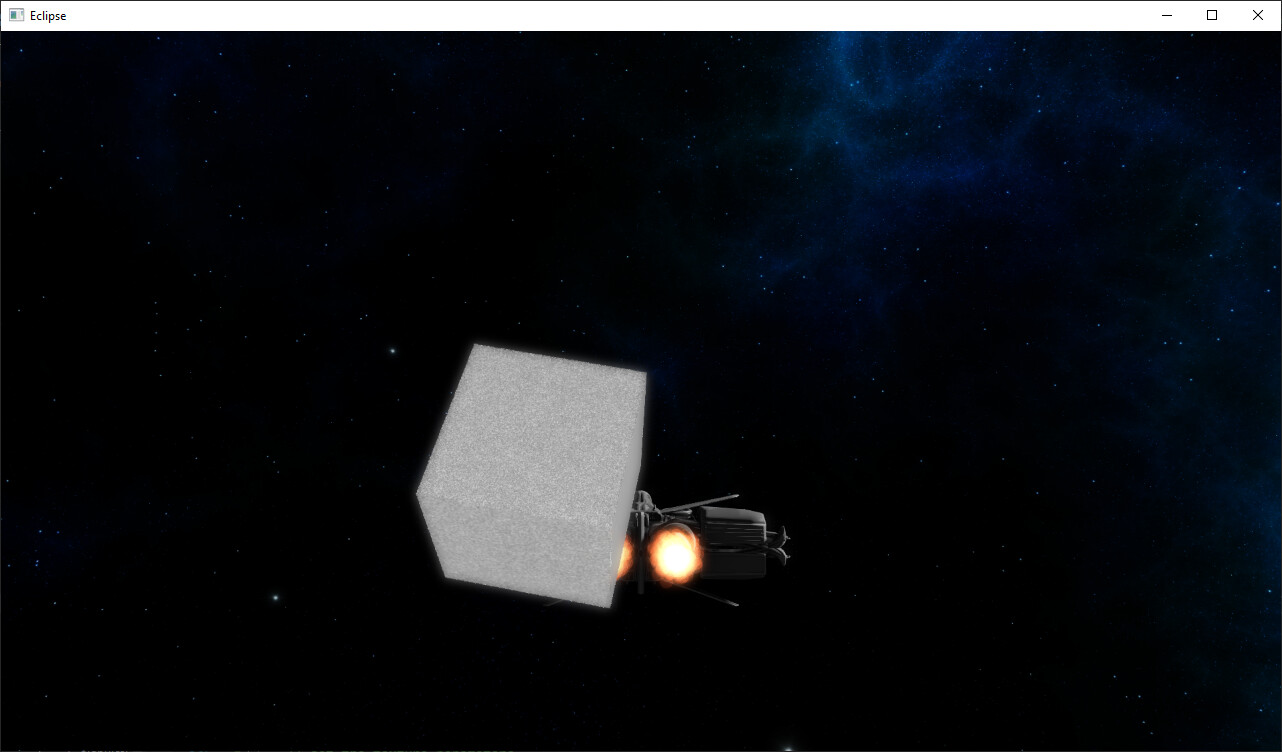
this cube on the picture is the result :
as expected there is a cube with noise as texture. I can not understand how the book (“OpenGL Development Cookbook”) expected to draw a volume with this setup. Am I missing something?